 |

| Quantity: | |
|---|---|
ZBL48150
ZHIBI
High Power 48v 2000w 3000w Intelligent Bdc Servo Drive Controller 150A
I. Overview
1.1 Scope of Application
Suitable for driving permanent magnet synchronous servo motor, low voltage AC servo motor, pmsm motor, permanent-magnet sychronous motor.
Applicable motor: 24V 1500W, 48V 3000W, 48V 4000W(with heat sink), 60V 4500W(with heat sink).
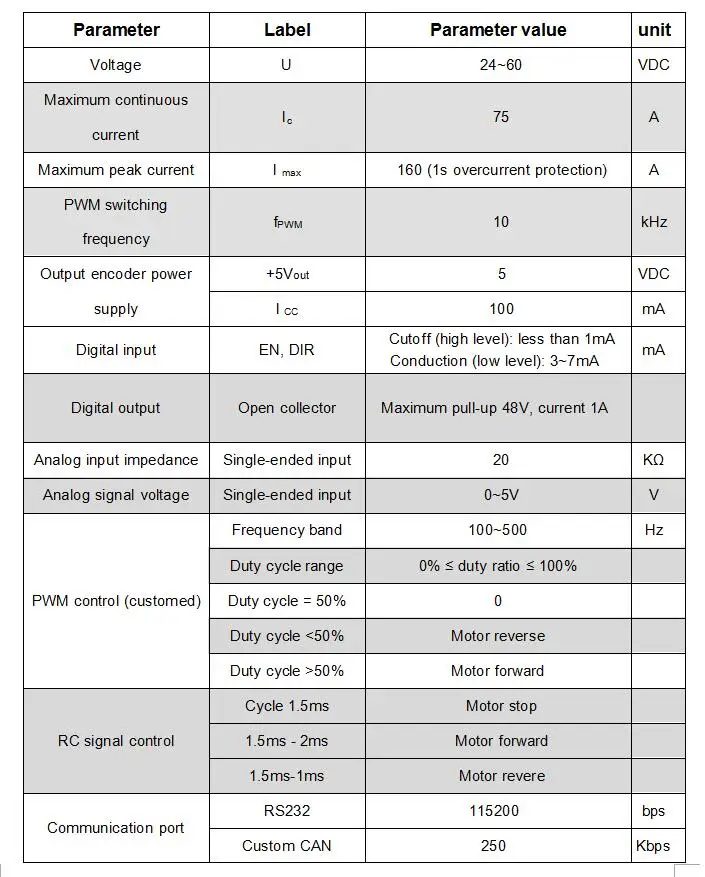
Continuous current 75A, maximum peak current 160A (1S overcurrent stop).
DC working power +24~60V±10%.
Speed mode, torque mode, position mode
1.2 Working Condition
1.2.1 Power supply
Rated working power: 24-60VDC.
Limit power supply range: 16--72VDC (reverse potential bleed 68V, if the power supply may exceed 68V, you need to explain the change threshold in advance).
It can provide instantaneous current overload capability of 2 times continuous current.
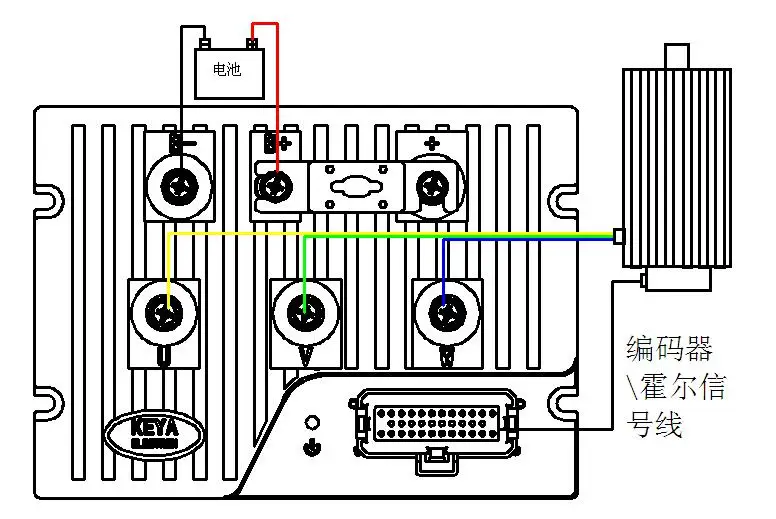
1.2.2 Feedback components
Incremental encoder (general product)
Hall sensor closed loop feedback
Magnetic encoder
1.2.3 Operating environment
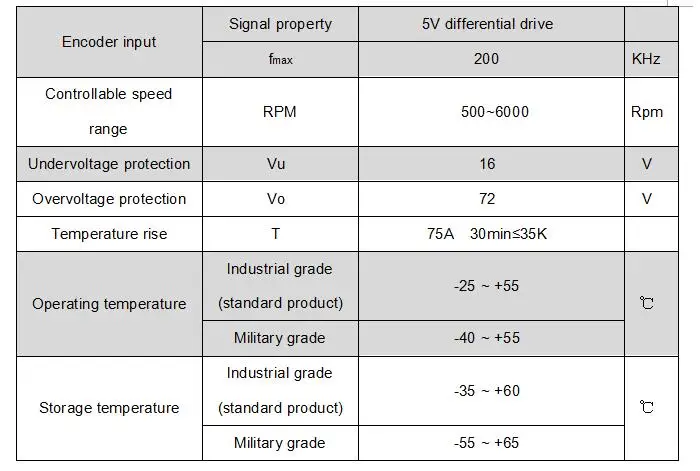
Operating temperature: -25~55 °C (based on ambient temperature).
Storage temperature: -35~65°C (based on ambient temperature).
Humidity: 5%--90%RH, condensation (25°C)
Protection level: IP54.
Insulation performance: input to the chassis DC600V, leakage current 0.07mA. The insulation resistance is 20 MΩ and more.
Three-proofing requirements: meet the requirements of three proofing (dust, moisture, salt spray).
Vibration requirements: frequency 5HZ ~ 25HZ, amplitude 3mm, 0.09g. 25HZ~200HZ, amplitude 1.47mm, 116g.
Horizontal, vertical, and longitudinal directions for 30 minutes.
Cooling method: natural cooling
Technical Index
2.1 Main function
Working mode: speed mode, torque mode.
Feedback components: incremental encoder (general product), Hall sensor close loop feedback, magnetic encoder.
Control port: RS232, CAN open, RC (model signal), 0-5V analog voltage, single-ended analog voltage (potentiometer).
External start and stop control.
Brake energy recovery function.
Fault LED indication.
It can be controlled by CAN open, RS232 for parameter reading and monitoring.
Motor speed control and data reading through RS232.
Drive internal temperature monitoring.
Overcurrent and overload protection. Overvoltage and undervoltage protection.
Temperature protection.
Blocking and flying protection.
Motor short circuit protection.
Back EMF bleed function (68V). if you power the controller with switching power supply or transformer power supply, please let me know in advance, we need to replace the discharge resistor.
2.2 Working mode configuration table
high power servo 24v 48v pmsm motor control foc control 150A
Control Port:

High Power 48v 2000w 3000w Intelligent Bdc Servo Drive Controller 150A
I. Overview
1.1 Scope of Application
Suitable for driving permanent magnet synchronous servo motor, low voltage AC servo motor, pmsm motor, permanent-magnet sychronous motor.
Applicable motor: 24V 1500W, 48V 3000W, 48V 4000W(with heat sink), 60V 4500W(with heat sink).
Continuous current 75A, maximum peak current 160A (1S overcurrent stop).
DC working power +24~60V±10%.
Speed mode, torque mode, position mode
1.2 Working Condition
1.2.1 Power supply
Rated working power: 24-60VDC.
Limit power supply range: 16--72VDC (reverse potential bleed 68V, if the power supply may exceed 68V, you need to explain the change threshold in advance).
It can provide instantaneous current overload capability of 2 times continuous current.
1.2.2 Feedback components
Incremental encoder (general product)
Hall sensor closed loop feedback
Magnetic encoder
1.2.3 Operating environment
Operating temperature: -25~55 °C (based on ambient temperature).
Storage temperature: -35~65°C (based on ambient temperature).
Humidity: 5%--90%RH, condensation (25°C)
Protection level: IP54.
Insulation performance: input to the chassis DC600V, leakage current 0.07mA. The insulation resistance is 20 MΩ and more.
Three-proofing requirements: meet the requirements of three proofing (dust, moisture, salt spray).
Vibration requirements: frequency 5HZ ~ 25HZ, amplitude 3mm, 0.09g. 25HZ~200HZ, amplitude 1.47mm, 116g.
Horizontal, vertical, and longitudinal directions for 30 minutes.
Cooling method: natural cooling
Technical Index
2.1 Main function
Working mode: speed mode, torque mode.
Feedback components: incremental encoder (general product), Hall sensor close loop feedback, magnetic encoder.
Control port: RS232, CAN open, RC (model signal), 0-5V analog voltage, single-ended analog voltage (potentiometer).
External start and stop control.
Brake energy recovery function.
Fault LED indication.
It can be controlled by CAN open, RS232 for parameter reading and monitoring.
Motor speed control and data reading through RS232.
Drive internal temperature monitoring.
Overcurrent and overload protection. Overvoltage and undervoltage protection.
Temperature protection.
Blocking and flying protection.
Motor short circuit protection.
Back EMF bleed function (68V). if you power the controller with switching power supply or transformer power supply, please let me know in advance, we need to replace the discharge resistor.
2.2 Working mode configuration table
high power servo 24v 48v pmsm motor control foc control 150A
Control Port:
